Loading...
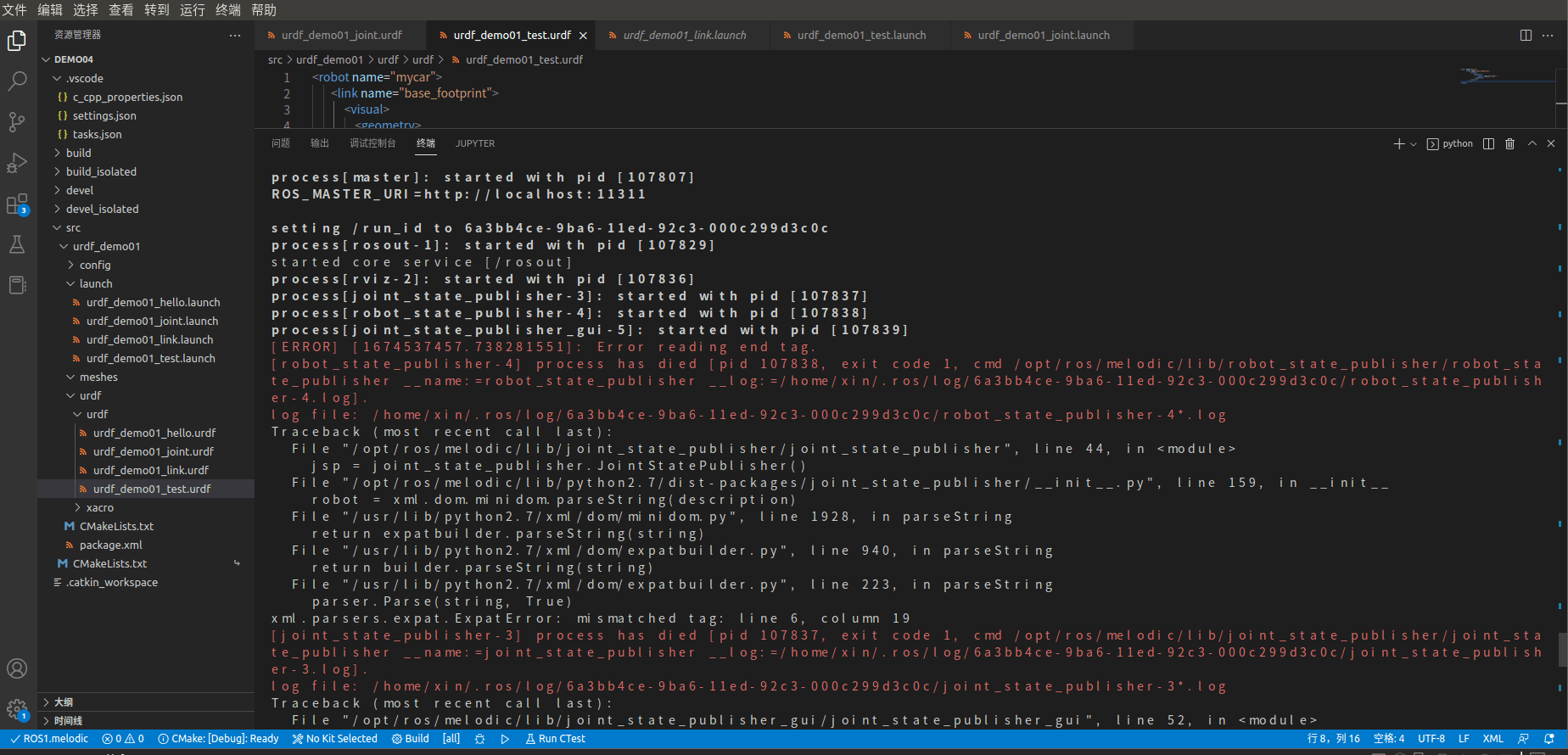
报错[ERROR] [1674537457.738281551]: Error reading end ...
报错1命令行输出如下错误提示UnicodeEncodeError: 'ascii' codec can'...
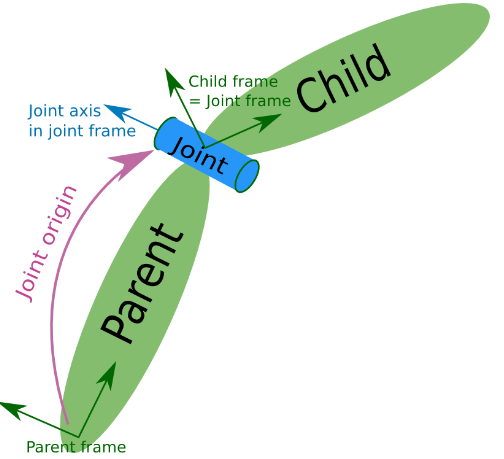
简介urdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限...
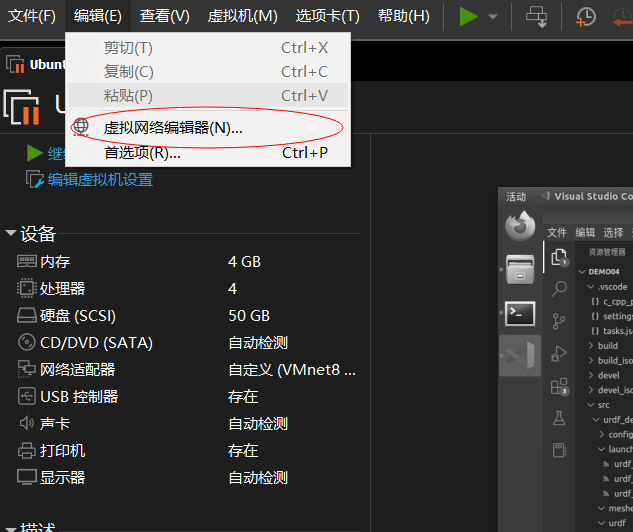
关闭所有虚拟机在VMware主页面找到编辑-->虚拟网络编辑器在虚拟网络编辑器中找到更改设置点击还...
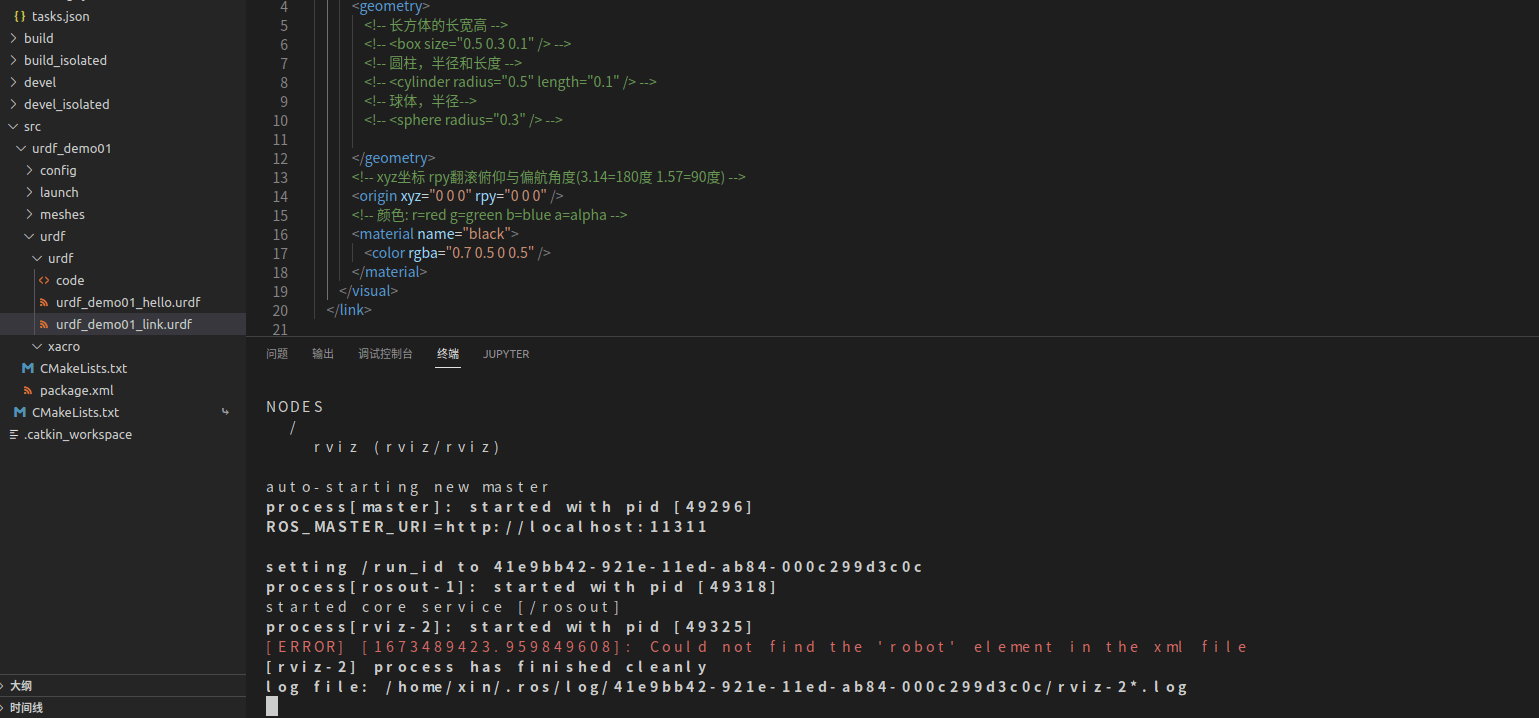
报错1报错原因缺失robot标签解决方法添加robot标签报错2报错原因geometry标签内无子元素解...