Loading...
简介场景:在 7.2.1 导航实现01_SLAM建图中,我们是通过键盘控制机器人移动实现建图的,而后续又...
move_base简介move_base 功能包提供了基于动作(action)的路径规划实现,move_...
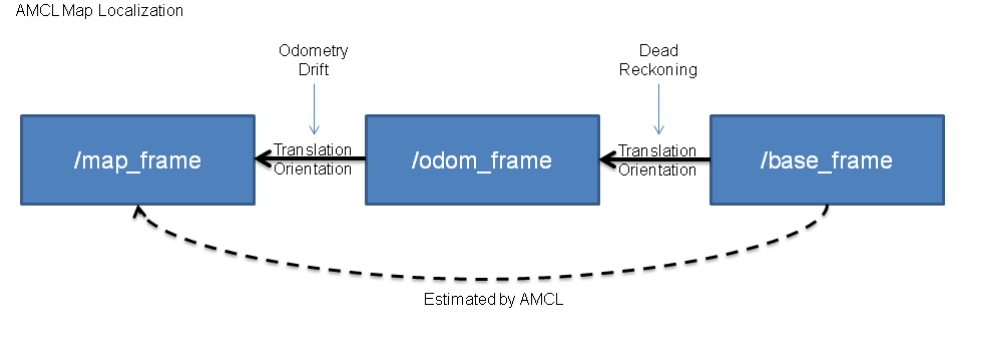
amcl简介AMCL(adaptive Monte Carlo Localization) 是用于2D移...
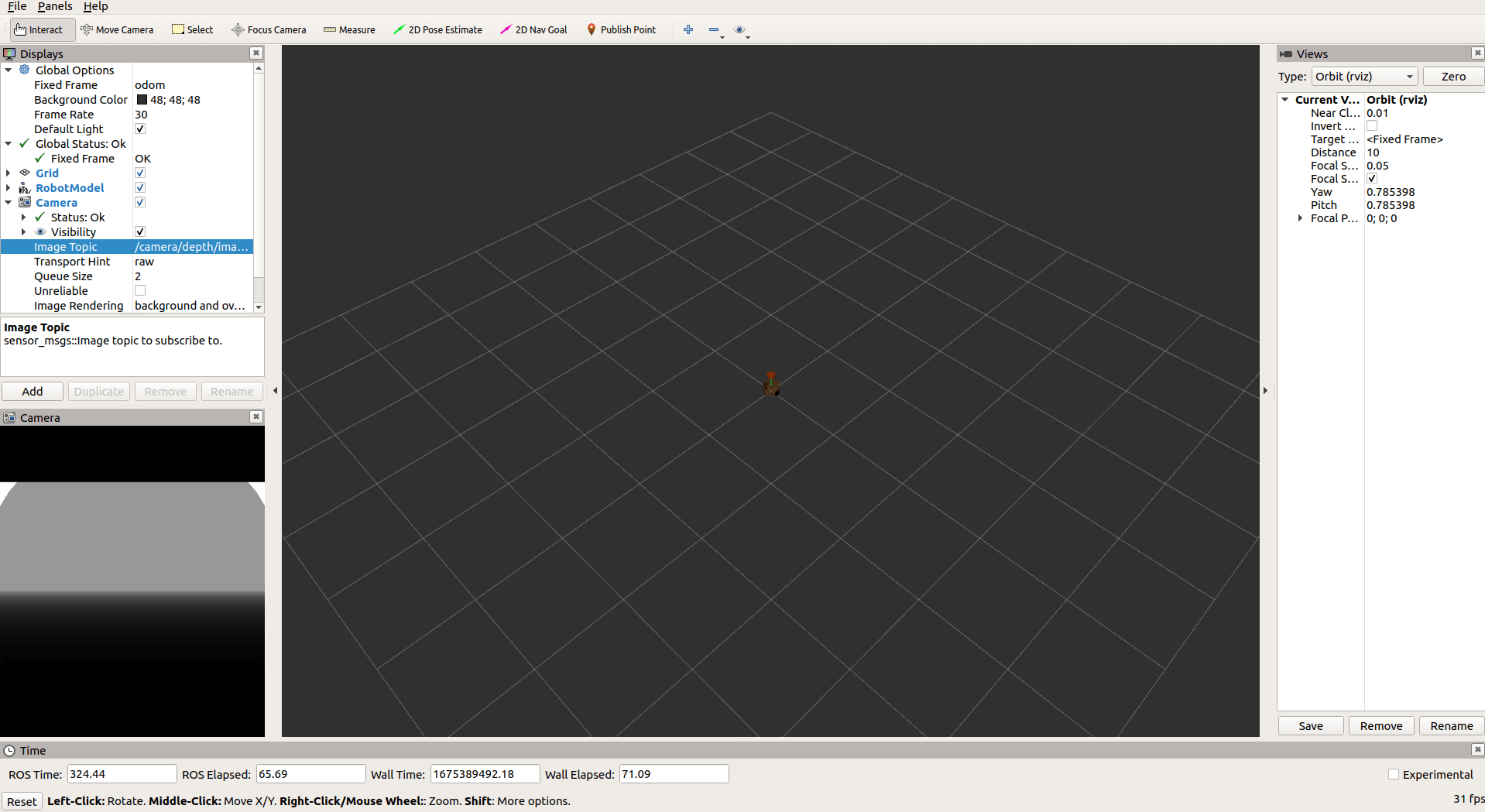
Rvizrviz是三维可视化工具,强调把已有的数据可视化显示rviz需要已有数据。rviz提供了很多插件...
暂时无可提供的摘要