Loading...
简介使用xacro优化上一节案例中驱动轮实现,需要使用变量封装底盘的半径、高度,使用数学公式动态计算底盘...
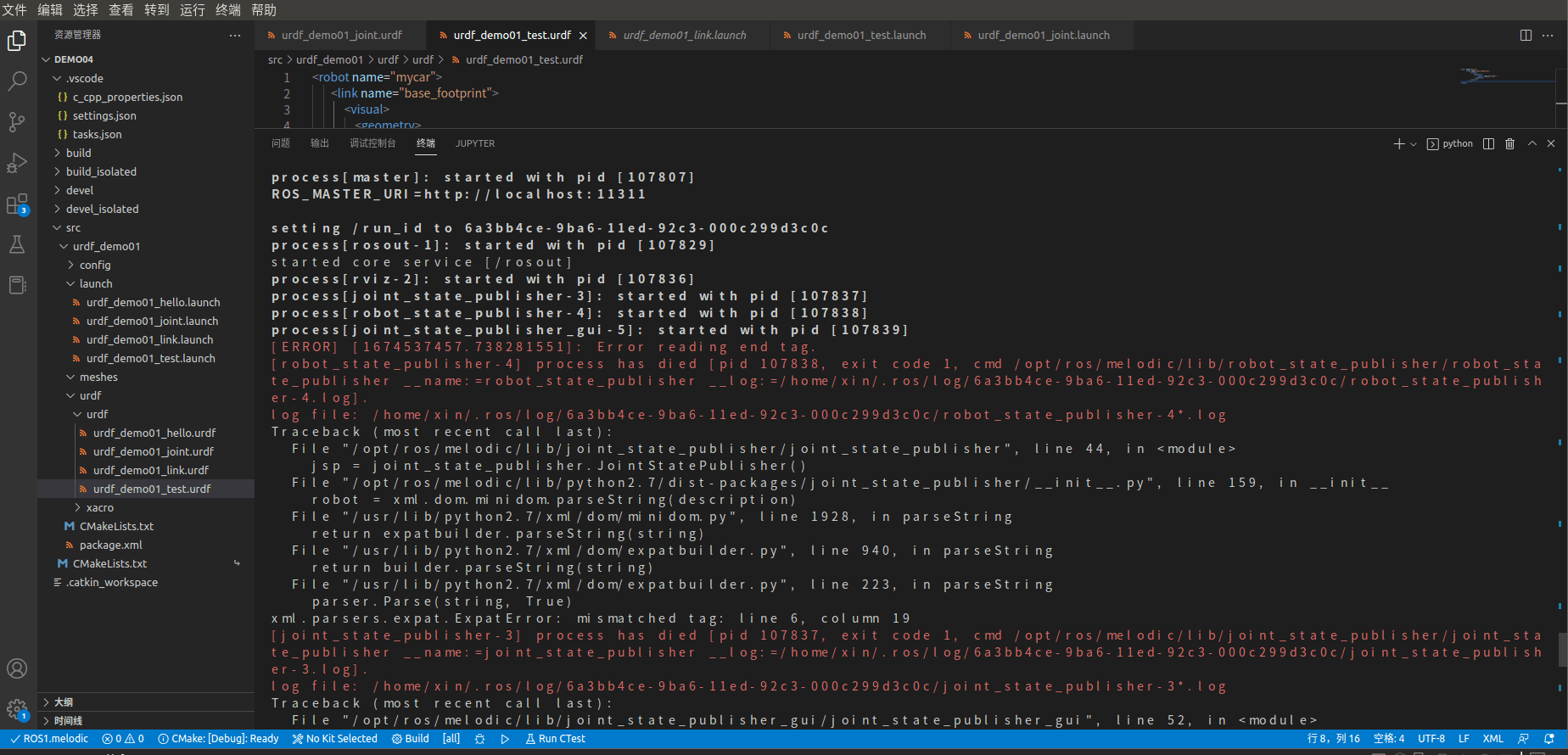
报错[ERROR] [1674537457.738281551]: Error reading end ...
报错1命令行输出如下错误提示UnicodeEncodeError: 'ascii' codec can'...
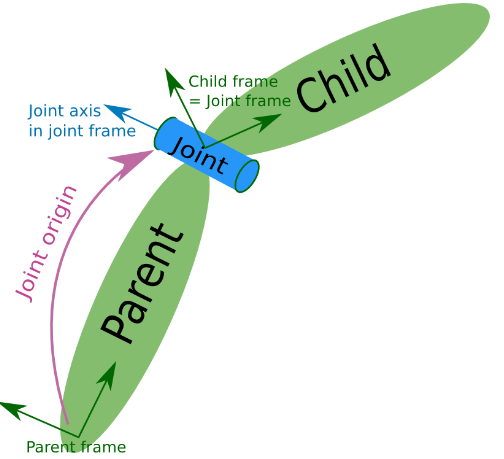
简介urdf 中的 joint 标签用于描述机器人关节的运动学和动力学属性,还可以指定关节运动的安全极限...
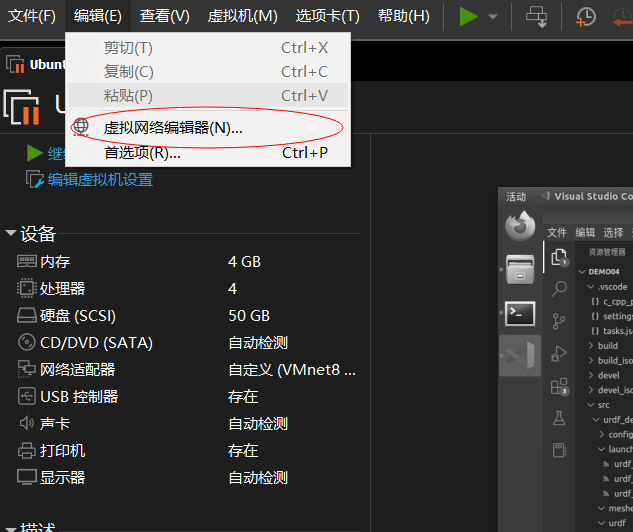
关闭所有虚拟机在VMware主页面找到编辑-->虚拟网络编辑器在虚拟网络编辑器中找到更改设置点击还...